|
by Shuzhi Sam Ge and Yaozhang Pan
 brown, cuddly bear lives in one of the labs of the Interactive and Digital Media Institute at the National University of Singapore. It looks like any ordinary stuffed toy, but talk to this bear, and it will talk back; hug the bear, and it will hug you. brown, cuddly bear lives in one of the labs of the Interactive and Digital Media Institute at the National University of Singapore. It looks like any ordinary stuffed toy, but talk to this bear, and it will talk back; hug the bear, and it will hug you.
The teddy, a resident of the Social Robotics Lab, is an example of a "interactive robotic pet", and it represents the progress that is being made in robotics thanks to the rapid advancement of technology. Robots can now be easily equipped with state-ofthe- art computing, electronics, mechatronics, and communications technologies for applications in the education, entertainment, and healthcare industries. The integration of these technologies in robots is also a first step towards realizing social robots ¨C robots which will walk amongst humans and interact with us while playing out their assigned roles in our society, as educators, for example, or guides, or cleaners.
Core technologies
 At the Social Robotics Lab, researchers are working on a number of different projects that take robotics in this direction. The interactive bear robot (Fig. 1), which could provide comfort and companionship to lonely children as well as being fun to play with, is one such enterprise. An interactive robotic pet, or intelligent companion, must have the ability to participate pro-actively with humans in a social environment and be able to meet humans' expectations of how a player in this environment should act. This requires the robot to possess an understanding of and have an adaptable social model of human society. At the Social Robotics Lab, researchers are working on a number of different projects that take robotics in this direction. The interactive bear robot (Fig. 1), which could provide comfort and companionship to lonely children as well as being fun to play with, is one such enterprise. An interactive robotic pet, or intelligent companion, must have the ability to participate pro-actively with humans in a social environment and be able to meet humans' expectations of how a player in this environment should act. This requires the robot to possess an understanding of and have an adaptable social model of human society.
 There are several core, indispensable modules in an interactive robotic pet, and technical contributions from the fields of electrical engineering and computer science play crucial roles in shaping the pet's capabilities. As electronic components get smaller and smaller, enabling complex circuitry to be miniaturized and power consumption to be lowered, the mobility of robots vastly increases. In parallel, sophisticated sensing, planning, and interaction mechanisms allow robots to perceive their environment, direct and focus their attention, and gather pertinent information, as well as interact with other agents (humans and other robots) via an understanding of hand gestures and other behavioral cues. Artificial intelligence modules analyze the information gathered and interface with behavioral modules to allow the social robot to make informed decisions and act in a natural manner. Some examples of interactive robotic pets developed by companies are shown shown in Fig. 2. There are several core, indispensable modules in an interactive robotic pet, and technical contributions from the fields of electrical engineering and computer science play crucial roles in shaping the pet's capabilities. As electronic components get smaller and smaller, enabling complex circuitry to be miniaturized and power consumption to be lowered, the mobility of robots vastly increases. In parallel, sophisticated sensing, planning, and interaction mechanisms allow robots to perceive their environment, direct and focus their attention, and gather pertinent information, as well as interact with other agents (humans and other robots) via an understanding of hand gestures and other behavioral cues. Artificial intelligence modules analyze the information gathered and interface with behavioral modules to allow the social robot to make informed decisions and act in a natural manner. Some examples of interactive robotic pets developed by companies are shown shown in Fig. 2.
Mind robotics
One of the most important research questions in the development of interactive robotic pets is how to improve communication between robots and humans. A novel approach comes from advances in cognitive neuroscience and brain imaging technologies, which provide an increasing ability to interact directly with activity in the brain.
 Over the past decade, research on direct functional interfaces between the brain and artificial devices, such as computers or robotic limbs, has succeeded so readily that a new multidisciplinary area devoted to the study of brain machine interactions (BMIs) is developing. This area is at the frontiers of systems neuroscience, bio sensing, computing, electronics, mechatronics and communications technologies. BMI technology may become commonplace in the near future. The picture below (Fig. 3) shows an experimental device used to collect signals from the brain and feed them directly to a computer or robot. Over the past decade, research on direct functional interfaces between the brain and artificial devices, such as computers or robotic limbs, has succeeded so readily that a new multidisciplinary area devoted to the study of brain machine interactions (BMIs) is developing. This area is at the frontiers of systems neuroscience, bio sensing, computing, electronics, mechatronics and communications technologies. BMI technology may become commonplace in the near future. The picture below (Fig. 3) shows an experimental device used to collect signals from the brain and feed them directly to a computer or robot.
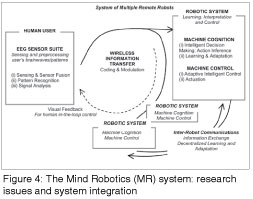 Based on this idea, we are developing a Mind Robotics (MR) system. The distinguishing feature of the MR system is the use of electroencephalogram (EEG) technology, which measures electrical activity produced by the brain as recorded by electrodes placed on the scalp, combined with pattern recognition technology, wireless communications and intelligent robotic control technology. The MR system would empower humans to remotely control robotic systems with their thoughts alone. A schematic diagram of this intelligent human-robotic collaboration system is shown in Fig. 4. It illustrates how multiple robots could be coordinated, emphasizing the scalability of a decentralized MR system. The MR system can also serve as a prototype for research into brainwave recognition, pushing the boundaries of knowledge. Based on this idea, we are developing a Mind Robotics (MR) system. The distinguishing feature of the MR system is the use of electroencephalogram (EEG) technology, which measures electrical activity produced by the brain as recorded by electrodes placed on the scalp, combined with pattern recognition technology, wireless communications and intelligent robotic control technology. The MR system would empower humans to remotely control robotic systems with their thoughts alone. A schematic diagram of this intelligent human-robotic collaboration system is shown in Fig. 4. It illustrates how multiple robots could be coordinated, emphasizing the scalability of a decentralized MR system. The MR system can also serve as a prototype for research into brainwave recognition, pushing the boundaries of knowledge.
Imagine a world in which intelligent robotic companions live among us, learn and grow with us, make us laugh and cry, and ultimately form long-term, endearing emotional bonds with us. They acquire knowledge about people and the world around them, accumulate memories, and have expressive capabilities for conveying emotions and affection. In addition, their superior efficiency in information-gathering and computation is tapped for our benefit. Within sensor-laden environments, robots sense our behavior, infer our internal states, and attend to our needs preemptively. Whatever one may think about the prospect of such a future, there is no doubt that the pace of technological advance means that robots are no longer confined to industry, but are coming to our daily lives in a big way.
 Click here to download the full issue for USD 6.50 Click here to download the full issue for USD 6.50
|